

Professor Silvia Ferrari gave a talk in CSV21: Tech in Focus. Find the full description of the event here and the recorded talk here!
Author: lisc5305
New article published in Journal of Guidance, Control, and Dynamics!
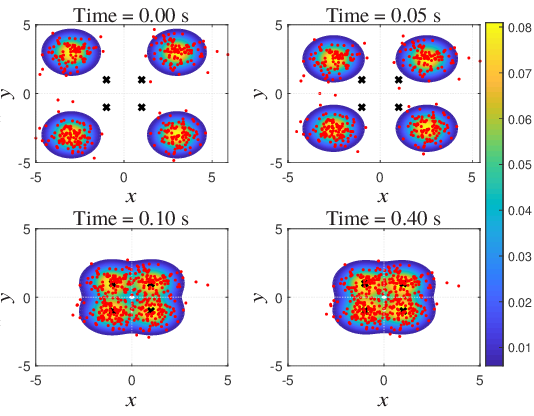
This paper presents a new Random Finite Set formulation to control the
distribution of swarm agents assuming an unknown or unspecified number of agents. Read the full article here!
New article published in Journal of Guidance, Control, and Dynamics!

This paper develops a new approach for determining the full flight envelope and trim map of minimally actuated flapping-wing micro aerial vehicles. Read the full article here!
Silvia Ferrari’s Interview on Behind the Scenes with Laurence Fishburne

Silvia Ferrari’s Interview on TG1

Professor Silvia Ferrari had an interview with a National TV News Channel in Italy about the work done in LISC. Find the news interview here!
Keith LeGrand has won the FUSION Best Student Paper Award

LISC member Keith LeGrand has been awarded the Fusion 2020 Best Paper Award for his paper on exploiting bounded sensor field-of-view geometry in tracking and sensor planning problems! LeGrand was awarded a cash prize and a travel award to present the paper at Fusion 2021 in South Africa. Read the paper here!
Autonomous Vehicle Workshop on Social Implications
 The Autonomous Vehicle Workshop, co-organized by Wendy Ju, Helen Nissenbaum, Jake Goldenfein, Sharon Ayalon and Silvia Ferrari, will bring together multi-disciplinary experts to discuss the social implications and ethical consequences of autonomous transportation, as well as the effort orientation for the improvement of individual, social and civic life. Find more information here!
The Autonomous Vehicle Workshop, co-organized by Wendy Ju, Helen Nissenbaum, Jake Goldenfein, Sharon Ayalon and Silvia Ferrari, will bring together multi-disciplinary experts to discuss the social implications and ethical consequences of autonomous transportation, as well as the effort orientation for the improvement of individual, social and civic life. Find more information here!
LISC Research Story by Cornell Research
 “Autonomous Vehicles for Air, Land, and Sea”: The LISC is equipping autonomous robots with an intelligence to go where man or woman may not be able to go—dangerous environments, complex situations under water or in the air. These robots can be quick with decision making and physical speed. And they can collaborate with each other. Read the full story here!
“Autonomous Vehicles for Air, Land, and Sea”: The LISC is equipping autonomous robots with an intelligence to go where man or woman may not be able to go—dangerous environments, complex situations under water or in the air. These robots can be quick with decision making and physical speed. And they can collaborate with each other. Read the full story here!
Veho Institute launches at Cornell Tech
 The Veho institute, co-led by Professor Ferrari, Unibo Rector Ubertini and Vice-Rector Sangiorgi, is advancing automotive engineering and data science through collaborations between Cornell and Unibo students and faculty, and auto industry partners, such as Dallara, Maserati, Lamborghini, Ferrari S.p.A, and other MUNER companies. Read the full story here!
The Veho institute, co-led by Professor Ferrari, Unibo Rector Ubertini and Vice-Rector Sangiorgi, is advancing automotive engineering and data science through collaborations between Cornell and Unibo students and faculty, and auto industry partners, such as Dallara, Maserati, Lamborghini, Ferrari S.p.A, and other MUNER companies. Read the full story here!
IEEE TCNS Special Issue 2021
The Call for Papers for our Special Issue 2021 on Very-large Scale Robotic (VLSR) Networks, to appear in the IEEE Transactions on Control of Network Systems, is now online. Please click here for CFP and important dates!