
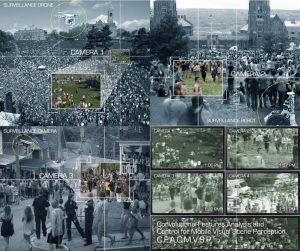
 Using a combination of recent developments, ranging from computer vision to decentralized estimation and control, this project will develop a deep-learning Bayesian-optimization framework hinging on sparse features for mobile cooperative scene perception. The methods developed in this project will be tested using real video data from Cornell’s campus as well as virtual data generated using a realistic game engine.
Using a combination of recent developments, ranging from computer vision to decentralized estimation and control, this project will develop a deep-learning Bayesian-optimization framework hinging on sparse features for mobile cooperative scene perception. The methods developed in this project will be tested using real video data from Cornell’s campus as well as virtual data generated using a realistic game engine.
Cornell Chronicle: Researchers link robots to surveillance teams
recode: These surveillance robots will work together to chase down suspects
Cornell Research: Collaborative Robotic Surveillance