

“A robot that can perform a task better and more accurately is valuable indeed. But what if a group of robots could work together to accomplish goals and tasks better than they ever could individually? A team of researchers recently put their minds to just that concept.” Read the full article here.
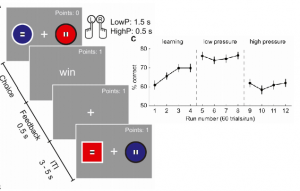 The paper by Hanna Oh-Descher of Duke University, in collaboration with Silvia Ferrari, “Probabilistic inference under time pressure leads to a cortical-to-subcortical shift in decision evidence integration” has been published in NeuroImage, Vol. 162, pp.138-150, November 2017. Read the full article
The paper by Hanna Oh-Descher of Duke University, in collaboration with Silvia Ferrari, “Probabilistic inference under time pressure leads to a cortical-to-subcortical shift in decision evidence integration” has been published in NeuroImage, Vol. 162, pp.138-150, November 2017. Read the full article  “Silvia Ferrari, Sibley School of Mechanical and Aerospace Engineering, with Robert J. Wood (Harvard University), is working toward a future where autonomous, small-scale robots would have similar capabilities, sensing and responding to their environments and maneuvering without human commands. These robots would be particularly invaluable for surveillance or reconnaissance missions in dangerous or remote environments.”
“Silvia Ferrari, Sibley School of Mechanical and Aerospace Engineering, with Robert J. Wood (Harvard University), is working toward a future where autonomous, small-scale robots would have similar capabilities, sensing and responding to their environments and maneuvering without human commands. These robots would be particularly invaluable for surveillance or reconnaissance missions in dangerous or remote environments.” Read it
Read it 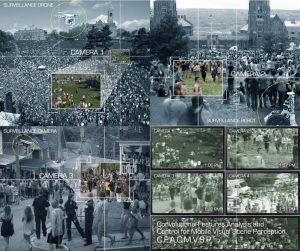 Using a combination of recent developments, ranging from computer vision to decentralized estimation and control, this project will develop a deep-learning Bayesian-optimization framework hinging on sparse features for mobile cooperative scene perception. The methods developed in this project will be tested using real video data from Cornell’s campus as well as virtual data generated using a realistic game engine.
Using a combination of recent developments, ranging from computer vision to decentralized estimation and control, this project will develop a deep-learning Bayesian-optimization framework hinging on sparse features for mobile cooperative scene perception. The methods developed in this project will be tested using real video data from Cornell’s campus as well as virtual data generated using a realistic game engine.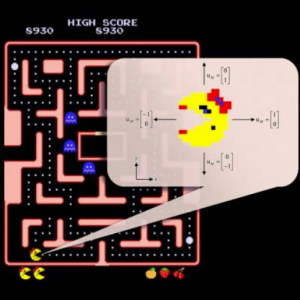 Our recent work using Ms. Pac Man as a benchmark problem for optimal control strategies has been featured on BGR, Tom’s Guide, and in the Cornell Chronicle! You can read more about how our control strategy beat the previous Ms. Pac Man AI record
Our recent work using Ms. Pac Man as a benchmark problem for optimal control strategies has been featured on BGR, Tom’s Guide, and in the Cornell Chronicle! You can read more about how our control strategy beat the previous Ms. Pac Man AI record